Ça fait du bien de voir des nouveaux pseudos dans cette section.
Bon, bien évidemment, je rejoins les autres sur les proportions.
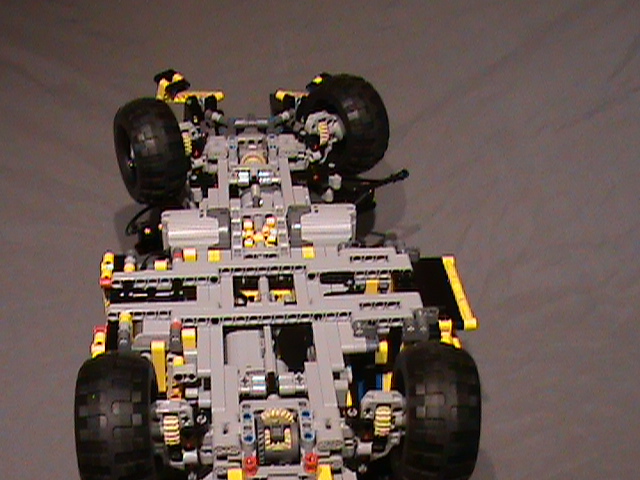
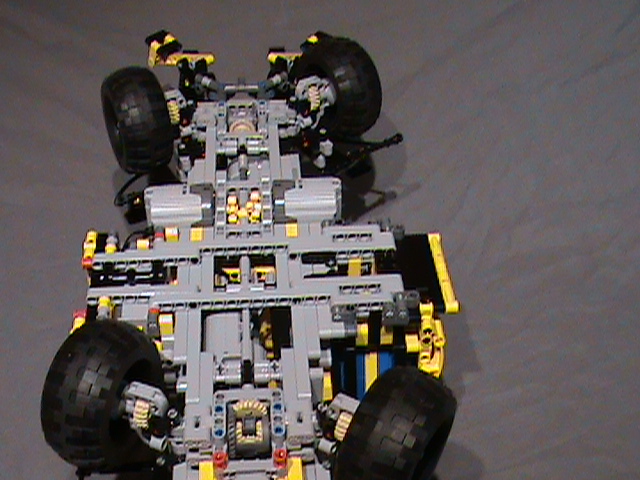
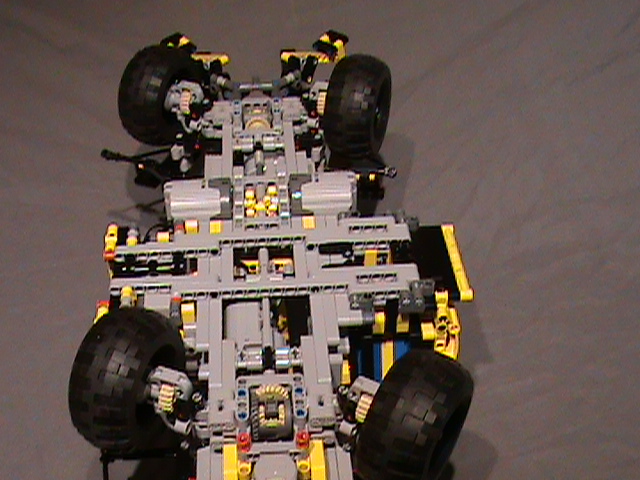
Ton engin est trop long. Un télescopique a presque le même empattement que sa largeur.
Pourquoi avoir laissé ce vide au niveau des XLs ? Ne penses-tu pas qu'il était possible de compacter le tout et de mettre la cabine au-dessus ?
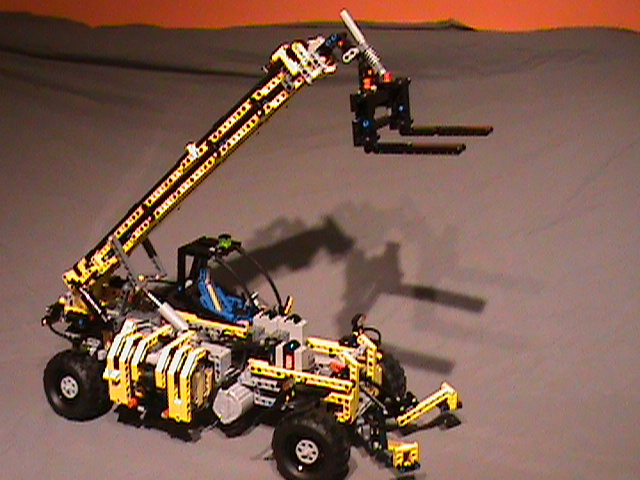
L'aspect est accentué par les carrosseries qui ne délimite pas correctement les formes de l'engin. Par exemple la cabine qui dépasse sur le coté.
Se baser sur un SET existant est une bonne idée pour débuter. Sauf peut-être pour ce SET qui est loin d'être une référence.

Regarde peut-être ce qui se fait sur le net ... Il y a aussi le télescopique de Pierre qui est manuel mais qui peut certainement être motorisé avec un peu de recherche.
http://forum.bricktechnic.fr/topic5645.html
Comment sont gérés les modes de direction ?
Difficile d'en dire plus car tu ne nous dis pas tes objectifs.
Pour de la motorisation, l'objectif est réussi car ça a certainement le mérite d'être jouable.
Bonne continuation !