[MOC][WIP] : Bobcat
Posté : 30 nov. 2017 12:32
Bonjour à tous,
Un projet que j'ai depuis un petit moment, faire un bobcat mini chargeur avec en outil soit une pelle ou des fourches pour palette.
Initialement je voulais le faire sur pneus comme ce modèle :

La première ébauche n'est pas concluante car les pneus suivants ont trop de grip, et lorsqu'il tourne ca n'est pas fuilde

Du coup je pars sur un modèle à chenille :

Mon but étant de l'utiliser avec une SBrick et Gamepad, j'hésite entre les deux choix suivants pour la transmission :
- Solution 1 : 1 moteur L pour chaque chenille, ce qui signifie actionner deux boutons/joystick pour aller droit
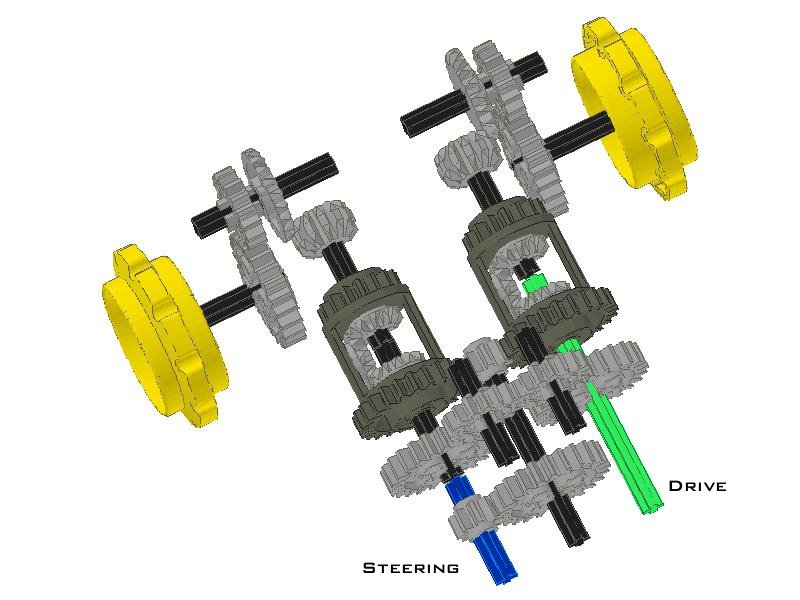
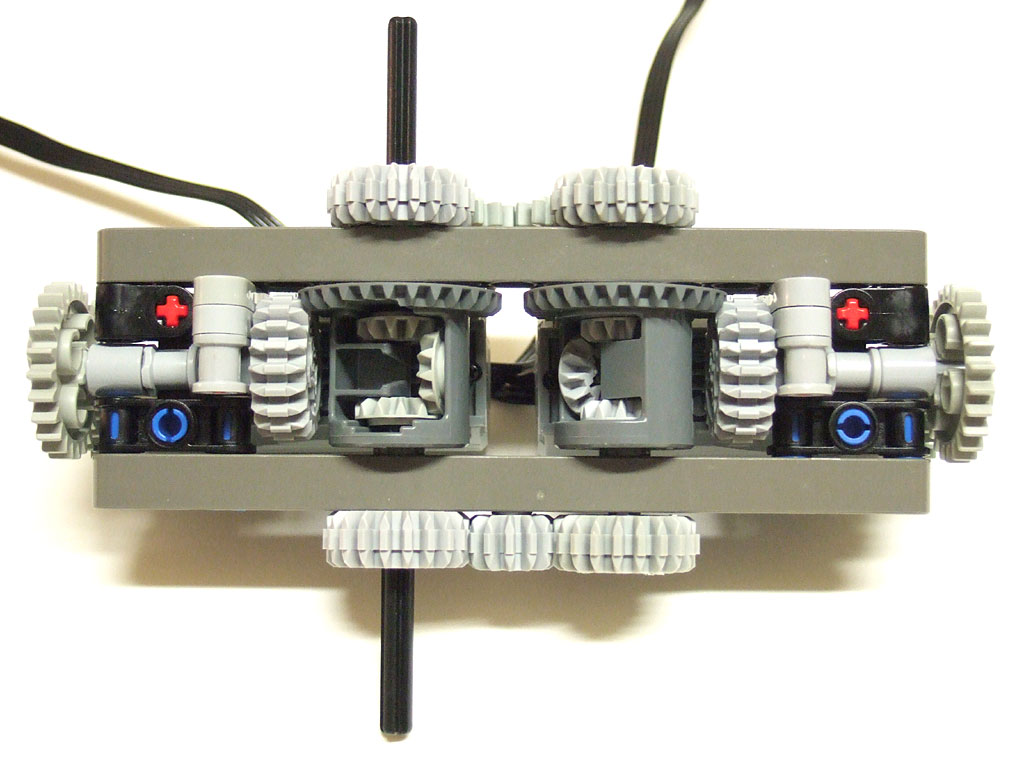
- Solution 2 : Utiliser deux différentiels du type de Philo, c'est à dire 1 XL qui fait la propulsion et un L qui fera la direction.
L'avantage de la solution 1, c'est simple, un renvoi d'angle et une reduction, le tour est joué
L’inconvénient : je ne suis pas fan de devoir actionner 2 boutons pour aller droit, de plus aller lentement signifie actionner doucement 2 joysticks, je pense que c'est très difficile d'aller droit.
L'avantage de la solution 2, 1 moteur fait la propulsion, donc on peut faire varier la vitesse tout en restant (à peu pres) droit. Je dis à peu près car comme c'est un différentiel, s'il y a une résistance d'un coté, le couple passera de l'autre. Aussi, pour avoir l'inversion, il y a une cascade de pignon supplémentaire, donc théoriquement plus de frottement d'un coté. Après un premier test ca n'est pas perceptible sur une petite distance.
L'inconvénient : C'est plus complexe à mettre en oeuvre dans un petit châssis, et ca "coute" plus cher car besoin de différentiel (même si ca n'est pas un critère)
Que pensez-vous des ces solutions ?
Un projet que j'ai depuis un petit moment, faire un bobcat mini chargeur avec en outil soit une pelle ou des fourches pour palette.
Initialement je voulais le faire sur pneus comme ce modèle :
La première ébauche n'est pas concluante car les pneus suivants ont trop de grip, et lorsqu'il tourne ca n'est pas fuilde
Du coup je pars sur un modèle à chenille :
Mon but étant de l'utiliser avec une SBrick et Gamepad, j'hésite entre les deux choix suivants pour la transmission :
- Solution 1 : 1 moteur L pour chaque chenille, ce qui signifie actionner deux boutons/joystick pour aller droit
- Solution 2 : Utiliser deux différentiels du type de Philo, c'est à dire 1 XL qui fait la propulsion et un L qui fera la direction.
L'avantage de la solution 1, c'est simple, un renvoi d'angle et une reduction, le tour est joué
L’inconvénient : je ne suis pas fan de devoir actionner 2 boutons pour aller droit, de plus aller lentement signifie actionner doucement 2 joysticks, je pense que c'est très difficile d'aller droit.
L'avantage de la solution 2, 1 moteur fait la propulsion, donc on peut faire varier la vitesse tout en restant (à peu pres) droit. Je dis à peu près car comme c'est un différentiel, s'il y a une résistance d'un coté, le couple passera de l'autre. Aussi, pour avoir l'inversion, il y a une cascade de pignon supplémentaire, donc théoriquement plus de frottement d'un coté. Après un premier test ca n'est pas perceptible sur une petite distance.
L'inconvénient : C'est plus complexe à mettre en oeuvre dans un petit châssis, et ca "coute" plus cher car besoin de différentiel (même si ca n'est pas un critère)
Que pensez-vous des ces solutions ?